자율주행시스템 임베디드 소프트웨어의 모델기반 설계
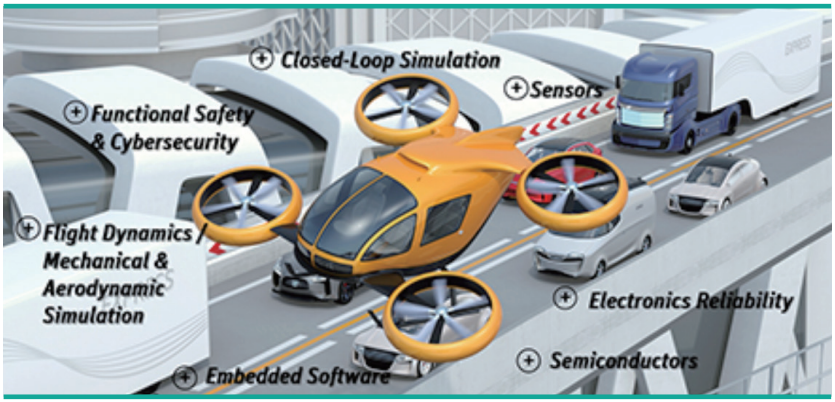
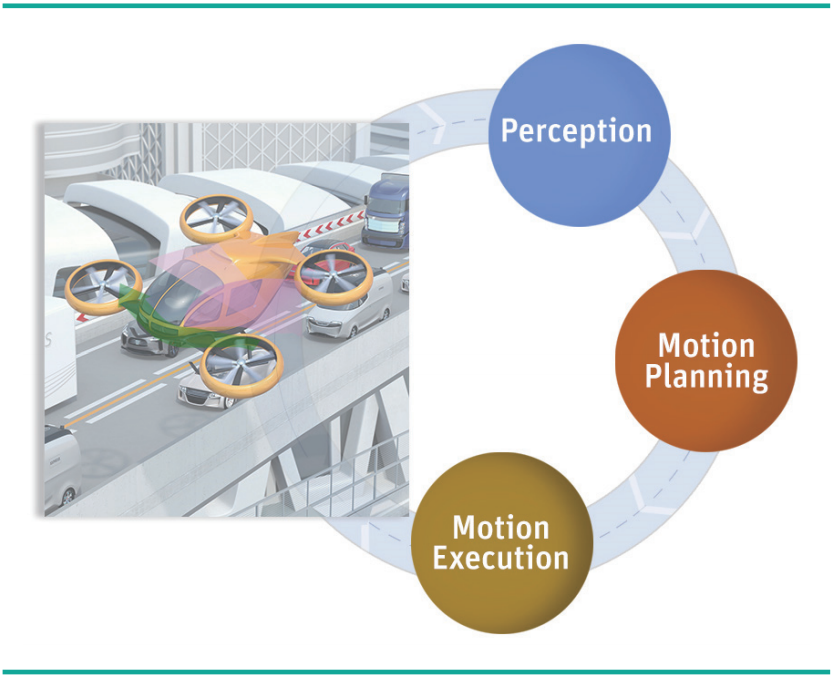
- [그림 7] 자동 비행 제어 루프
※ 자료 : ANSYS
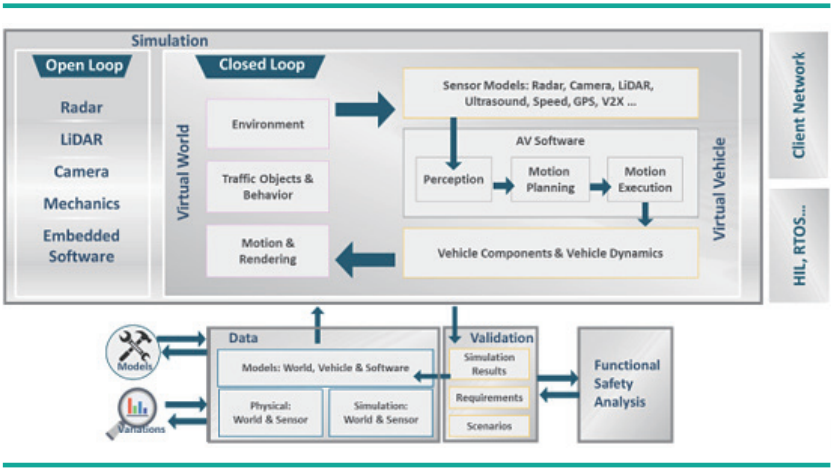
- 전술한 시뮬레이션 결과, 자율시스템의 안전을 확보하게 되고 모델기반 설계를 통해 구현함으로써 검증 결과를 변경없이 구현하게 된다.
- 자율비행 제어 루프는 센서와 센서 퓨전에서 들어오는 입력 데이터를 취할 Perception과 비행 계획을 결정하는 Planning과 액추에이터를 구동하기 위한 Execution이 포함된다. 완전 자율주행차량 제어 루프를 구현하기 위해 기계학습·딥러닝과 클래식 제어 로직의 조합이 사용되고 있는데, 이 제어루프는 주기적으로 실행되어 차량이 지속적인 환경 변화에 대응할 수 있다.
- 제어 로직을 위한 코드를 설계하고 생성하기 위해, 자율주행차량용 소프트웨어 모델에서 자동으로 코드를 생성할 수 있는 포괄적인 솔루션이 제공되고 있다. 이러한 솔루션은 임베디드 소프트웨어가 DO-178C 안전 표준 목표를 매우 효율적으로 충족시킬 수 있도록 하며, 개발 및 인증 시간을 대폭 단축하는 데 도움이 된다.